机构名称:
¥ 1.0
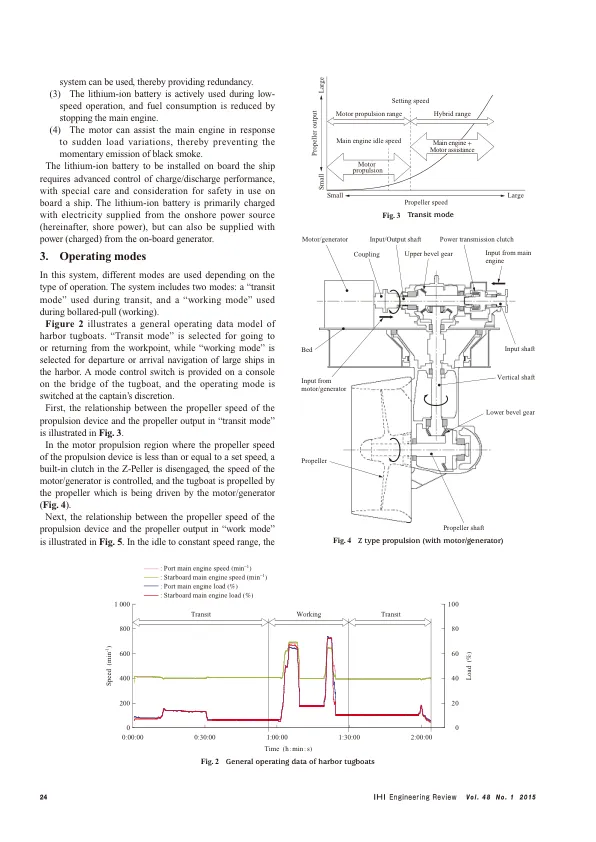
在此系统中,根据操作类型使用不同的模式。系统包括两种模式:在运输过程中使用的“运输模式”,以及在孔毛皮(工作)期间使用的“工作模式”。图2说明了港口拖船的一般操作数据模型。“运输模式”被选择去工作点或从工作点返回,而“工作模式”被选择以出发或到达大型船只在港口的到达导航。在拖船桥上的控制台上提供了模式控制开关,并且按照船长的酌处权进行操作模式。首先,在图。3。在电动机推进区域中,推进装置的螺旋桨速度小于或等于设定的速度,Z-peller中的内置离合器是断开的,电机/发电机的速度受到控制的,并且拖船是由电动机/发电机驱动的螺旋桨推动的(图。4)。接下来,在图。5。在闲置速度范围内,
混合拖船系统的开发
主要关键词

相关文件推荐