机构名称:
¥ 1.0
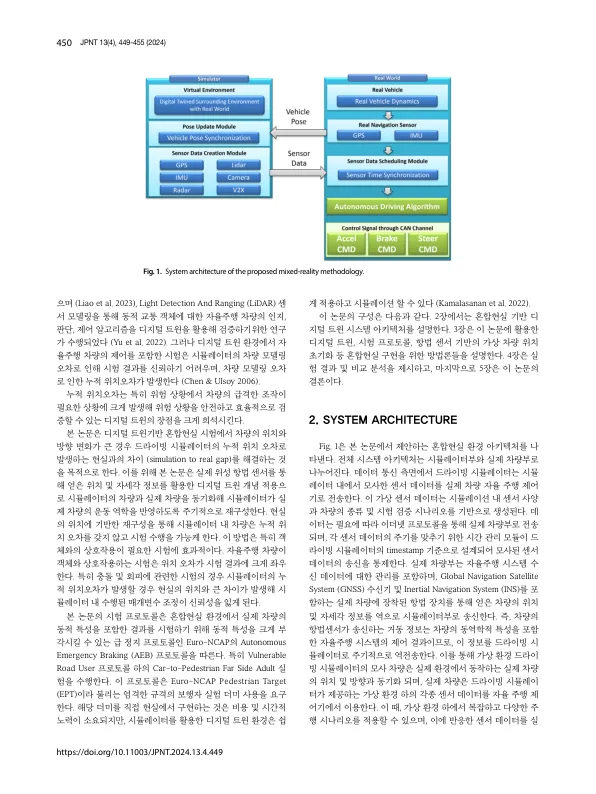
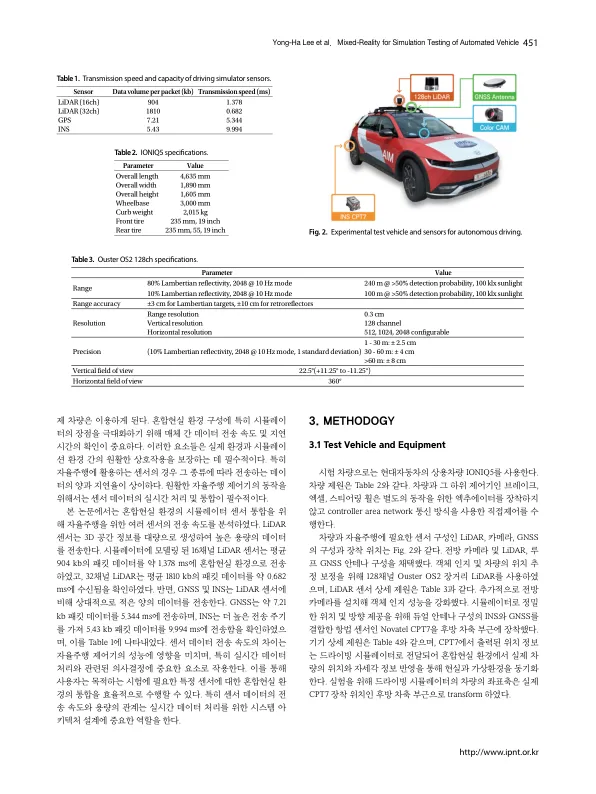
自主驾驶需要在复杂环境中安全有效的航行。这导致对可靠测试方法的需求增加,在这种方法中,驾驶模拟器被广泛用于模拟自动驾驶汽车中的传感器。此外,结合了真实和模拟环境的数字双胞胎的概念正在应用于自动驾驶汽车,以进行有效且逼真的测试。但是,模拟器中车辆建模的不准确性可能导致累积位置误差,尤其是在急剧操纵期间,破坏了测试结果的可靠性。本文通过使用导航数据同步车辆位置和方向来纠正驾驶模拟器环境中累积错误的方法。系统会定期调整模拟器中的车辆动力学,以反映现实世界的动态,消除累积位置误差并缩小模拟与现实世界环境之间的差距。这种方法对于基于互动的测试(例如自动紧急制动(AEB))特别有效,该位置精度至关重要。为了证明这种混合现实系统体系结构的可行性,根据欧洲NCAP AEB协议进行了实验。结果说明了提出方法在减轻模拟器错误和增强自动驾驶测试的总体可靠性方面的好处。
自主驾驶验证的混合现实模拟测试
主要关键词

相关文件推荐