机构名称:
¥ 1.0
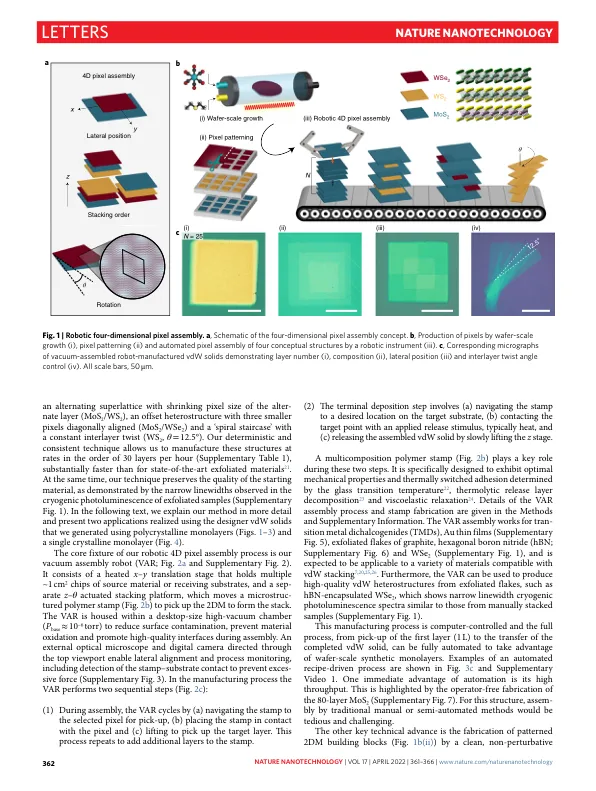
通过组装层状二维材料 1、2,可以设计出具有原子级精确垂直组成的范德华 (vdW) 固体。然而,由微机械剥离的薄片 3、4 手工组装结构与可扩展和快速制造不兼容。进一步设计 vdW 固体需要精确设计和控制所有三个空间维度上的组成以及层间旋转。本文,我们报告了一种机器人四维像素组装方法,用于以前所未有的速度、精心设计、大面积和角度控制制造 vdW 固体。我们使用机器人组装由原子级薄的二维组件制成的预图案化“像素”。晶圆级二维材料薄膜的生长和图案化采用清洁、非接触式工艺,并使用由高真空机器人驱动的工程粘合剂印章进行组装。我们制备了多达 80 个独立层的范德华固体,由 100 × 100 μ m 2 的区域组成,这些区域具有预先设计的图案形状、横向/垂直编程的成分和可控的层间角度。这使得对范德华固体进行有效的光学光谱分析成为可能,揭示了 MoS 2 中新的激子和吸光度层依赖性。此外,我们制备了扭曲的 N 层组件,其中我们观察到了扭曲的四层 WS 2 在≥ 4° 的大层间扭曲角下的原子重构。我们的方法能够快速制造原子级分辨的量子材料,这有助于充分发挥范德华异质结构作为新物理 2、5、6 和先进电子技术 7、8 平台的潜力。对硅等无机晶体材料的结构和化学成分进行精确的三维 (3D) 空间控制(x、y、z)是集成电路的基础。通过堆叠二维材料 (2DM) 形成的范德华 (vdW) 固体不受晶格可公度性或层间键合的限制,因此与传统的顺序沉积晶体 1、2 相比具有两个优势。首先,相邻层之间的晶格和化学灵活性意味着可以生产具有层可调电学 4、5、9、磁性 9、10 和光电 11-14 特性的任意垂直晶体组合物序列。其次,这种层间灵活性引入了一个额外的维度 θ,即层间晶格旋转或扭曲,作为控制 vdW 固体性质的新自由度。这已在
范德华固体的机器人四维像素组装
主要关键词


相关文件推荐