机构名称:
¥ 1.0
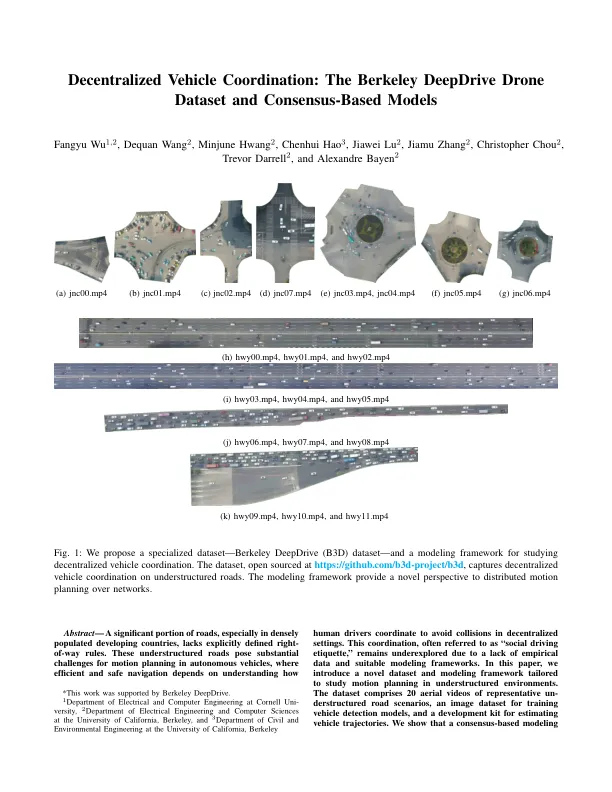
在建筑环境中的导航,例如驾驶,循环和步行,是跨越驾驶和人类机器人相互作用的关键领域。能够在结构化环境中运行的自主剂的驱动是一个公认的领域,根部延伸到控制理论和机器人技术的早期。在运输的背景下,研究人员在结构化环境中进行了广泛研究的导航,例如自由流高速公路和信号的城市街道。但是,与结构化道路的导航相比,由于缺乏经验数据和问题的复杂性,在没有明确定义的通行权法规的道路上(没有明确定义的通行权法规的道路)进行了相比。理解不良导航的第一种基本要素是经验数据。为此,相机视频特别有效,因为1)他们以相对较低的成本捕获了在道路上的丰富动态,2)它们允许通过直接检查进行Quantative评估,3)3)它们可以通过现代计算机视觉实现定性分析。尽管过去进行了广泛的研究,但大多数现有的视频数据集仅着眼于结构化环境中的驾驶行为。在未建筑的道路环境中的行为,例如经常合并和未信号交叉点的拥挤的高速公路,很少受到调查。这个问题的数据稀缺无疑阻碍了对这种环境中导航的理解。为了弥合经验数据中的这一差距,我们提出了伯克利deepdrive无人机(B3D)数据集。这个谈判这个惯性框架的数据集记录了在未结构化的道路环境中驾驶行为的丰富动态,包括未信号的十字路口,未信号的回旋处,带有煤矿的高速公路,带停下来的高速公路,带有停车场的高速公路,以及与合并瓶颈的高速公路,据我们所知,这是迄今为止第一个广泛涵盖未结构化驾驶行为的无人机数据集。难题的另一部分是合适的建模范式。自动驾驶汽车中的常规控制和规划结构由从上到下的四层抽象组成:1)路由,2)行为决策,3)运动计划,以及4)车辆控制[14]。尤其是在第二个行为层中,经常采用预测模式来预测周围车辆的运动,然后在该动作计划范围内计划避免碰撞。在结构化环境中,这种经典的预测范式虽然有效地驾驶,但在未结构化的道路环境中不足。例如,在一个未信号的十字路口,驾驶员动态地谈判通行权:当两辆冲突的车辆在相似的时间接近交叉点时,一个被认为更为aggressive的人通常会“赢得”通行的优先级。
Berkeley DeepDrive无人机数据集和共识 -
主要关键词




相关文件推荐