机构名称:
¥ 1.0
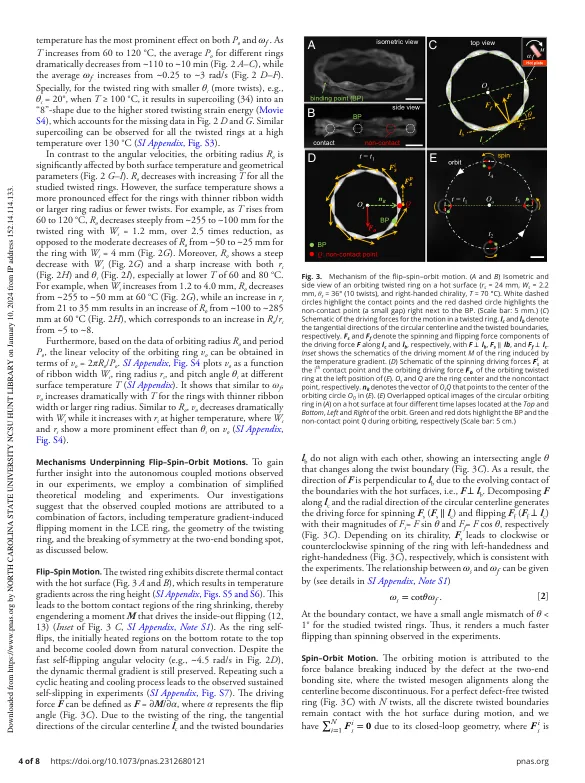
周期性自旋 - 轨道运动本质上是普遍存在的,从绕核的电子到旋转太阳的旋转行星。在柔软的移动机器人技术中实现自动周期性轨道运动,沿着圆形和非圆路径,对于对未知环境的适应性和智能探索至关重要,这是尚未实现的巨大挑战。在这里,我们报告了利用一个封闭的环形环拓扑,并有缺陷,以使能够实现具有定期旋转的自动软机器人 - 具有编程的圆形和重新编程的不规则形状轨迹的周期性旋转运动。通过将扭曲的液体晶体弹性丝带粘合到封闭的环环拓扑结构中,机器人表现出三个耦合的周期性自我 - 响应恒定的温度或恒定光源:内部 - 向外 - 向外翻转,自我旋转,环绕环中心,并在环外的点周围旋转。耦合的旋转和轨道运动具有相同的方向和周期。旋转或轨道方向取决于扭曲的手性,而轨道半径和周期是由扭曲的环几何形状和热驱动决定的。翻转旋转和轨道运动分别来自扭曲的环拓扑和分别打破力对称性的粘结部位缺陷。通过利用扭曲 - 编码的自主翻转 - 旋转 - 轨道运动,我们展示了机器人智能绘制未知限制空间的几何界限的潜力,包括圆形形状,包括圆形,正方形,三角形,三角形,三角形,五角形以及五角形和凹陷的范围,并与多个机器人的范围以及不幸的是,以及及其及其范围的健康范围以及及其及其及其及其及其及其及其及其及其及其及其及健康的范围。
自主周期性翻转的扭曲环形拓扑...
主要关键词




相关文件推荐