机构名称:
¥ 1.0
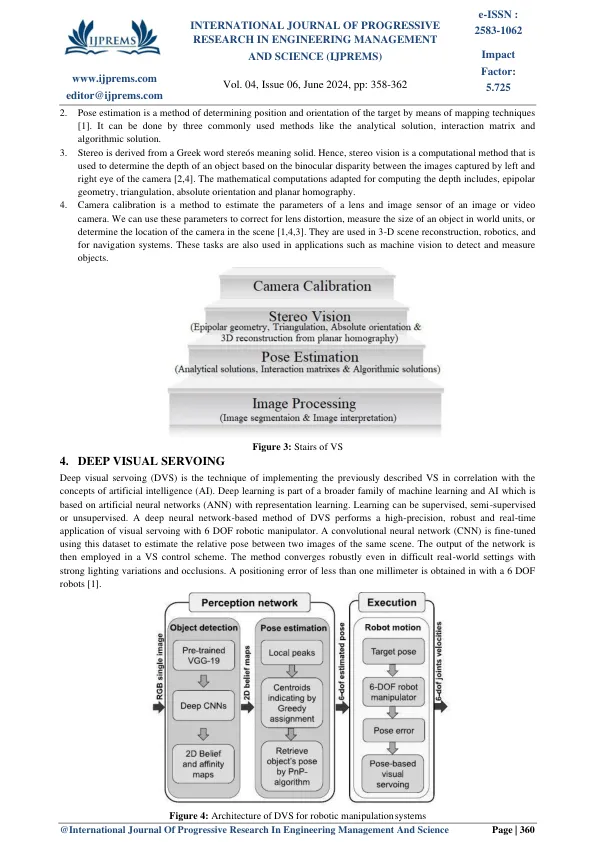
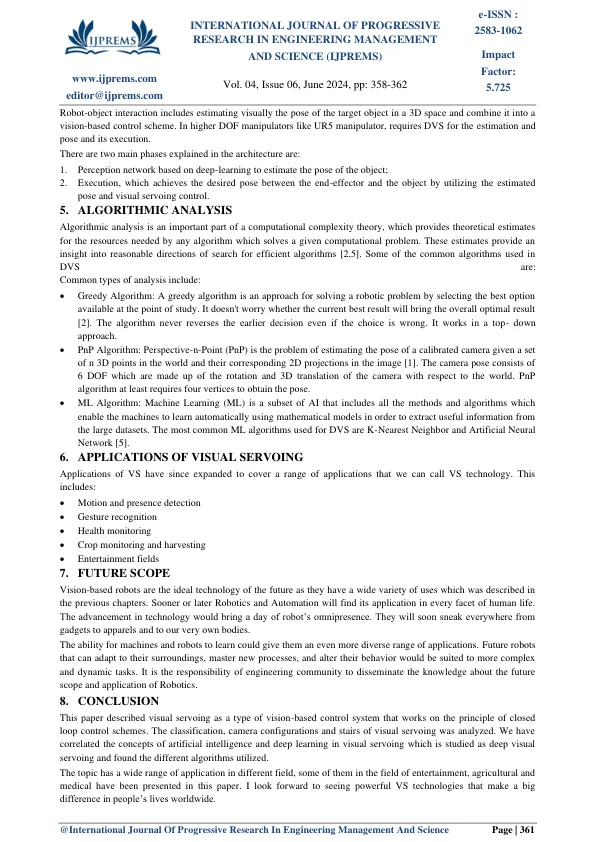
纸张涉及视觉伺服(VS),这是一种使用视觉信息引导机器人的众所周知的方法。在这里,将图像处理,机器人技术和控制理论组合在一起,以控制机器人的运动。该主题解释了VS的分类以及不同的相机配置及其控件。它还涵盖了图像处理,姿势估计,立体声视觉和摄像机校准,以机器人概念为例。图像处理包括两个基本操作:图像分割和图像解释。姿势代表机器人的位置和方向,该位置和方向是通过分析溶液,相互作用矩阵和算法溶液估算的。立体视觉代表基于机器人左和右眼(相机)对象图像之间的双眼差的对象深度的计算。对象的深度是通过四种基本方法计算的:来自平面同构象的表现几何,三角剖分,绝对取向和3D重建。摄像机校准是确定特定相机参数的过程,以便使用指定的测量完成操作。此外,它还侧重于基于3D视觉伺服和深层神经网络的机器人操纵(在学校中的娱乐场所),非线性鲁棒性视觉伺服器控制,用于机器人柑橘的收获,基于图像的磁滞性减少,以减少灵活的内窥镜仪器(Laparososcic Robotic robotic Sulobots)。
robotics中的视觉伺服 - ijprems.com
主要关键词


相关文件推荐