机构名称:
¥ 1.0
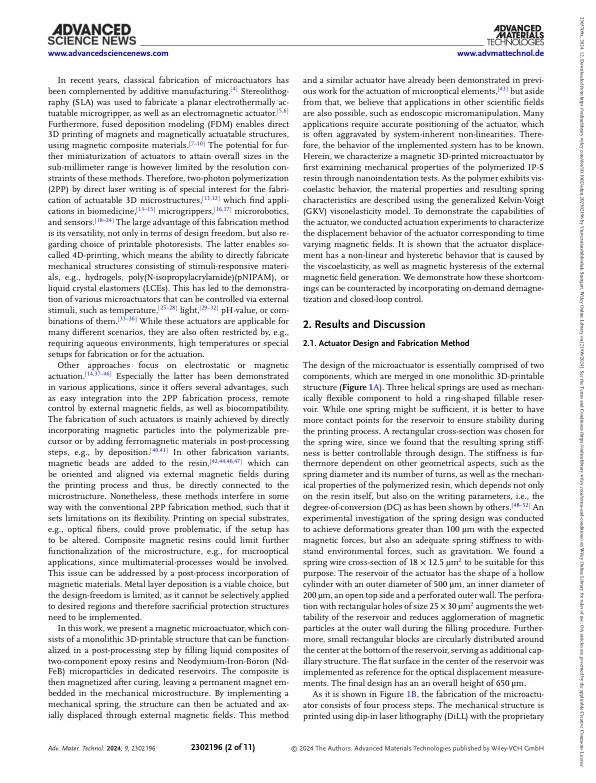
近年来,传统的 MEMS 微致动器已由通过双光子聚合 (2PP) 制造的 3D 打印可驱动微结构所补充。本文展示了一种新型紧凑型 3D 打印磁驱动微致动器,其直径为 500 μ m,最初设计用于微光学系统。它是通过在简单的后处理步骤中将 NdFeB 微粒和环氧树脂的复合材料并入打印机械结构的指定容器中而制造的。微致动器结构具有机械弹簧,允许在大位移下进行连续定位。通过对 IP-S 块体结构进行纳米压痕的机械研究揭示了一种粘弹性材料行为,可通过二元素通用开尔文-沃格特粘弹性模型来描述。然后使用获得的材料参数来模拟和表征微致动器的弹簧行为。使用外部微线圈进行驱动实验。测量了峰值电流为 106 mA、持续时间为 1 至 100 秒的三角电流脉冲的执行器位移,导致位移为 69.1 至 88.9 μ m。观察到执行器的滞后行为,这归因于芯材料的粘弹性和磁性。实验的数值模拟也证明了这种行为。实时退磁和闭环控制的实施可实现高重复性和精确定位。
磁性 3D 打印微执行器的制造和特性
主要关键词




相关文件推荐