机构名称:
¥ 1.0
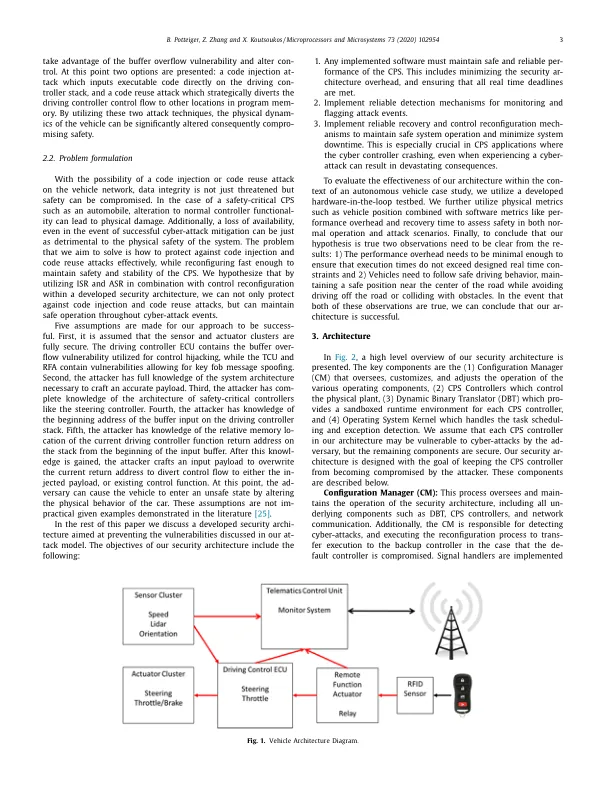
随着网络物理系统(CPS)的越来越连接的性质,新的攻击矢量以前在设计过程中未考虑。特别是,自动驾驶汽车是最有风险的CPS应用程序之一,包括大量旧软件,未经信任的第三方应用程序和远程通信接口等挑战。随着零日漏洞的不断发现,攻击者可以利用这种漏洞注入恶意代码,甚至利用现有的合法代码来接管CPS的网络部分。由于CP的紧密耦合性质,这可能导致以不良或毁灭性的方式改变身体行为。因此,反应强化系统不再有效,但是必须采取更积极的方法。移动目标防御(MTD)技术,例如指令集随机化(ISR)和地址空间随机 - ization(ASR),已证明对代码注入和代码重复使用攻击有效。但是,这些MTD技术可能导致控制系统崩溃,这在CPS应用中是无法接受的,因为这种崩溃可能会导致灾难性后果。因此,对于控制网络攻击时,通过控制重新构造以维持系统的可用性,MTD技术至关重要。本文通过集成移动目标防御技术,检测和恢复机制来确保安全,可靠和可预测的系统操作,解决了在攻击中维护CPS的系统和安全性的问题。特别是,我们考虑了对代码注入以及代码重复使用攻击的问题,并重新进行了足够快的速度,以确保维持自动驾驶汽车控制器的安全性和稳定性。通过使用MTD,例如ISR和ASR,我们的方法提供了防止攻击者获得执行代码注入和代码重复使用攻击所需的侦察知识的优势,确保攻击者无法在第一个地方找到脆弱性。我们的系统实现包括利用AES 256 ISR和核糖粒的运行时MTD的组合,以及利用攻击检测和重新配置功能的控制管理。我们利用自动驾驶汽车案例研究中开发的安全体系结构,利用定制的开发硬件在环测试台上。
微处理器和微系统
主要关键词




相关文件推荐