机构名称:
¥ 1.0
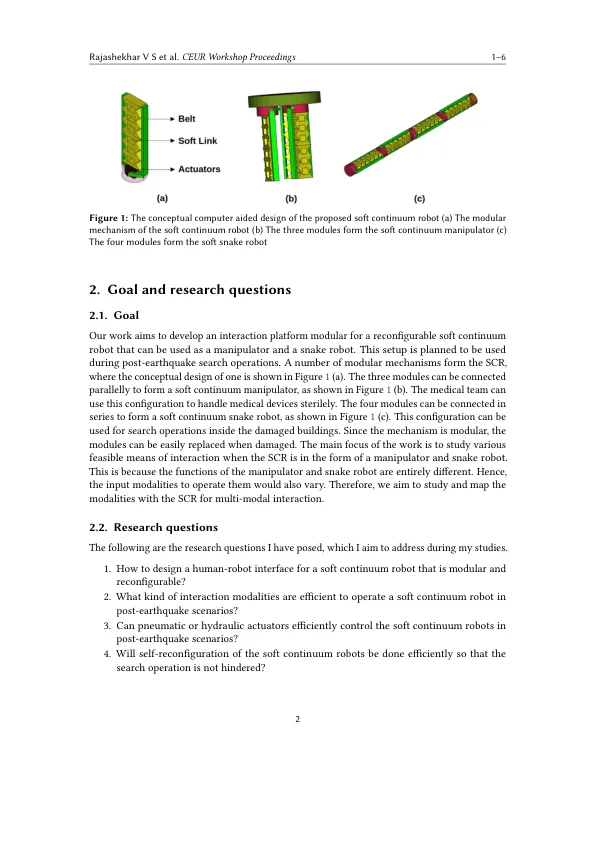
摘要,如果人类机器人相互作用(HRI)易于执行,则在机器人协助的搜索和救援操作效率将是有效的。可以使用柔软的机器人来完成,与刚性相比,该机器人的性能更好。其中,由于其光滑的性质,可以使用柔软的连续机器人(SCR)。SCRS有两种类型:软连续操作器(SCM)和软蛇机器人(SSR)。尽管这两个机器人在功能上不同,但在结构上是相似的。因此,这些机器人可以模块化和重新配置。SCM可以协助医疗团队进行采摘操作,而SSR可以穿越诸如地震之类的灾难后发生的限制空间。从我们的调查中推断出,文献中并没有很多研究工作侧重于disasaster后情况下的SCR的HRI方法。因此,在这项工作中,我们专注于开发模块化和可重构的SCR的HRI方法。
在搜索后搜索操作期间软连续机器人的多模式相互作用
主要关键词




相关文件推荐