机构名称:
¥ 1.0
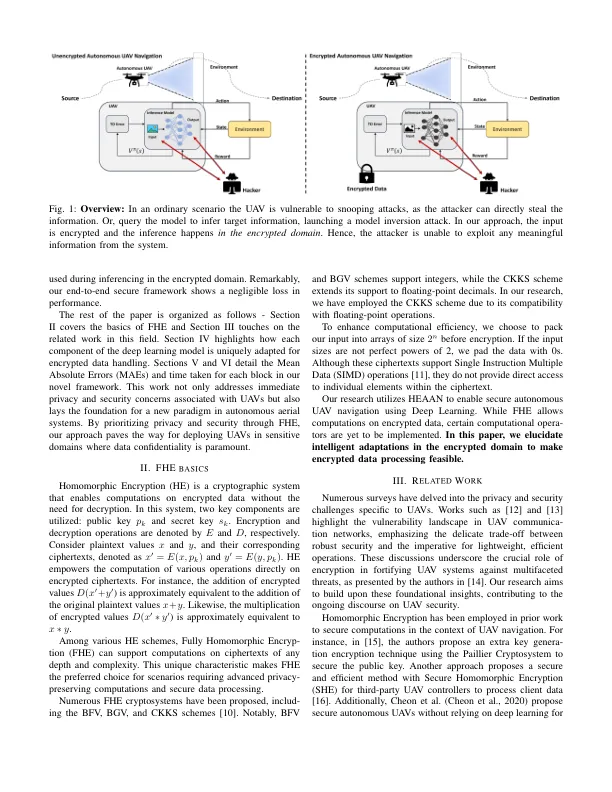
摘要 - 自主无人驾驶汽车(UAV)已成为国防,执法,灾难响应和产品交付的重要工具。这些自主导航系统需要一个无线通信网络,并且最近是基于深度学习的。在诸如边境保护或灾难响应之类的关键场景中,确保自主无人机的安全导航至关重要。但是,这些自主无人机容易受到通过通信网络或深度学习模型的对抗性攻击 - 窃听 /中间 /成员 /成员推理 /重建。为了解决这种敏感性,我们提出了一种创新的方法,该方法结合了增强学习(RL)和完全同型加密(FHE),以实现安全的自主无人机导航。此端到端的安全框架是为无人机摄像机捕获的实时视频供稿而设计的,并利用FHE对加密的输入图像执行推断。虽然FHE允许对加密数据进行计算,但某些计算运算符尚未实现。卷积神经网络,完全连接的神经网络,激活功能和OpenAI Gym库被精心适应FHE域,以实现加密的数据处理。我们通过广泛的实验证明了我们提出的方法的功效。我们提出的方法可确保自主无人机导航中的安全性和隐私性,并且绩效损失微不足道。索引术语 - 自主无人驾驶汽车,完全同构加密,隐私,增强学习
增强自主无人机导航的隐私和安全性
主要关键词


相关文件推荐