机构名称:
¥ 2.0
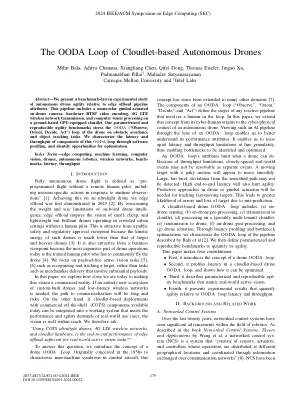
摘要 - 在过去的十年中,使用自动无人机系统进行测量,搜救或最后一英里的交付呈指数增长。随着这些应用的兴起,需要在复杂和不确定的环境中运行无人机的高度稳健,关键算法。此外,快速快速使无人机能够覆盖更多的地面,提高生产率并进一步增强其用例。一个用于开发高速导航中使用的算法的代理是自动无人机赛车的任务,研究人员将无人机计划无人机通过一系列大门,并尽快避免使用板载传感器和有限的计算能力。速度和加速度分别超过80 kph和4 g,在整个感知,计划,控制和国家估计中提出了重大挑战。为了达到最高性能,系统需要实时算法,这些算法对运动模糊,高动态范围,模型不确定性,空气动力学干扰以及通常无法预测的对手。该调查涵盖了自主无人机在基于模型和基于学习的方法中竞争的进展。我们提供了多年来的领域,其发展的概述,并以将来面临的最大挑战和开放性问题得出结论。
自主无人机赛车:调查
主要关键词



相关文件推荐