机构名称:
¥ 1.0
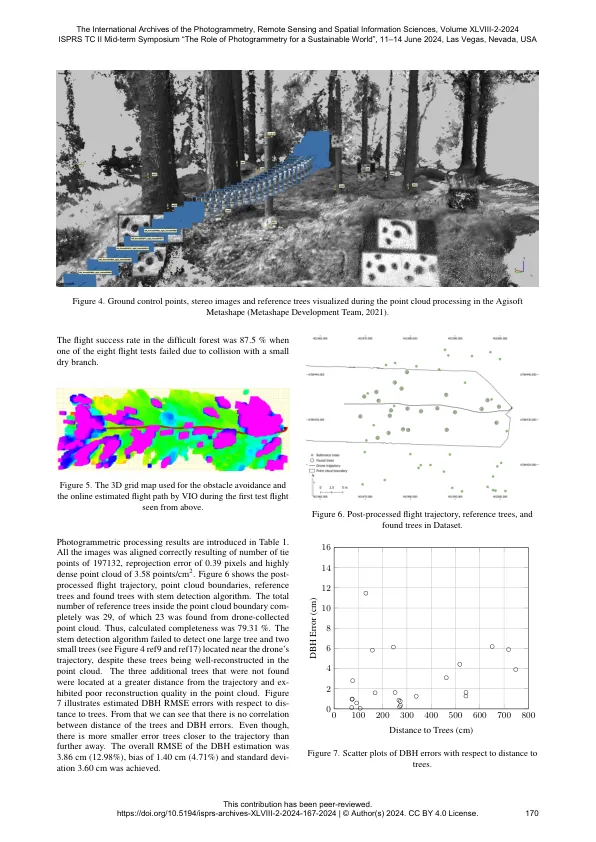
在过去的十年中,在森林监测和遥感中使用无人机已经非常受欢迎。大多数监视任务发生在高海拔和露天的情况下,但在过去的几年中,无人机也对自动范围的数据收集产生了兴趣。但是,在森林冠层下飞行是一项复杂的任务,因为无人机无法将全球导航卫星系统(GNSS)用于定位,并且必须不断避免在其路径上避免障碍物,例如树木,树枝和岩石。因此,森林冠层下基于无人机的数据收集仍然主要基于人类飞行员的手动控制。在GNSS贬低的障碍物富裕环境中,自主飞行在过去几年中一直是一个积极研究的主题,并且在文献中发表了各种开源方法。但是,大多数研究纯粹是从机器人技术的观看点进行的,只有少数研究在森林科学和机器人技术的边界中发表,旨在采取步骤迈向自主森林数据收集。在这项研究中,使用最先进的开源方法开发并实施了自动伪造无人机的原型。该原型利用自主障碍物避免自主障碍物和基于视觉惯用式渗透测量法的自主障碍物避免自主障碍物的轨迹计划者。通过在两个不同的北方森林测试地块中使用中等和困难密度的两种不同的硬件进行多个测试飞行来评估原型的飞行性能。DBH估计的RMSE为3.86 cm(12.98%)。此外,通过在一次飞往3D点云的测试飞行中使用低成本立体声摄像机收集的数据,并通过在高度(DBH)估算上执行直径乳房,从而获得了森林数据收集性能的第一个结果。在中等密度的森林中,所有七个试飞都取得了成功,但是在艰难的测试森林中,八个测试飞行之一失败了。
自动机器人无人机系统用于映射森林内部
主要关键词




相关文件推荐