机构名称:
¥ 1.0
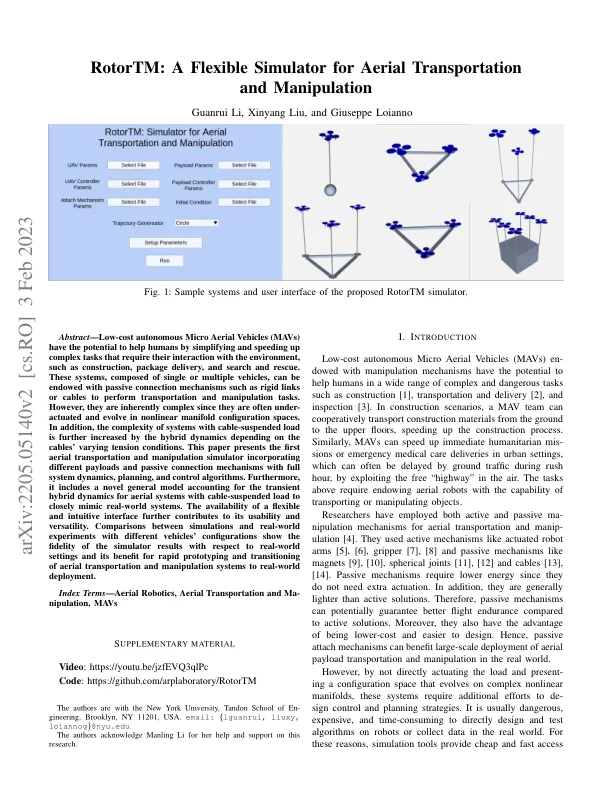
摘要 — 低成本自主微型飞行器 (MAV) 有可能通过简化和加快需要与环境互动的复杂任务来帮助人类,例如建筑、包裹递送和搜索救援。这些系统由单个或多个飞行器组成,可以配备被动连接机制,例如刚性连杆或电缆,以执行运输和操作任务。然而,它们本质上很复杂,因为它们经常处于欠驱动状态并在非线性流形配置空间中演变。此外,电缆悬挂负载系统的复杂性因取决于电缆变化的张力条件的混合动力学而进一步增加。本文介绍了第一个空中运输和操作模拟器,它结合了不同的有效载荷和被动连接机制以及完整的系统动力学、规划和控制算法。此外,它还包括一个新颖的通用模型,该模型考虑了带有电缆悬挂负载的空中系统的瞬态混合动力学,以紧密模拟现实世界的系统。灵活直观的界面进一步提高了其可用性和多功能性。通过对模拟结果和采用不同车辆配置的真实实验进行比较,可以证明模拟器结果相对于真实世界设置的保真度,以及其对快速原型设计和空中运输及操作系统向真实世界部署的过渡的益处。
灵活的空中运输和操控模拟器
主要关键词


相关文件推荐