机构名称:
¥ 1.0
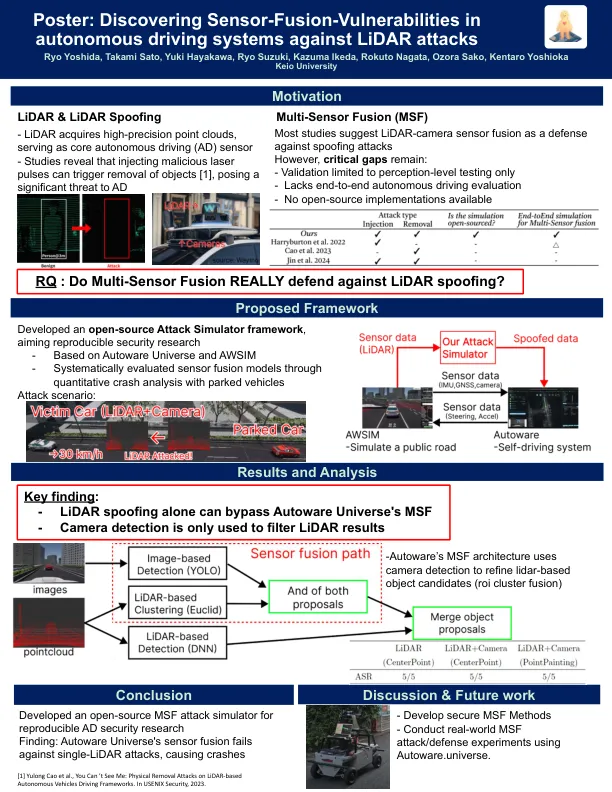
摘要 - 结合了LiDAR和相机等备用器的多数传感器融合(MSF),它引起了人们的关注,以此作为对Lidar Spoofiff的对策,威胁着自动驾驶系统的安全性。但是,当前无国界医生实施的有效性尚未在实际的自主驾驶系统中彻底列出。在这项研究中,我们提出了一个初始框架,旨在基于开源自动驾驶软件AutoWare Universe和Awsim Simulator探索MSF的潜在漏洞。通过使用此框架进行的实验,我们证明了自动保健宇宙中的MSF实现也可能导致整个系统的危险状态,即使摄像机丢失了镜头点云,摄像机可以正确检测对象。此漏洞之所以出现,是因为相机信息仅限于点云聚集中的补充作用。我们的发现表明,自动保健宇宙中的MSF实施缺乏针对LiDAR SPOOFIFG FIFG攻击的能力,由于其结构上的限制。该框架可在以下网址获得:https:// gi thub.com/keio-csg/multi-sensor-defense-analysis-platform。
海报:在自动驾驶系统中发现传感器 - 融合 - 视力攻击
主要关键词
相关文件推荐