机构名称:
¥ 1.0
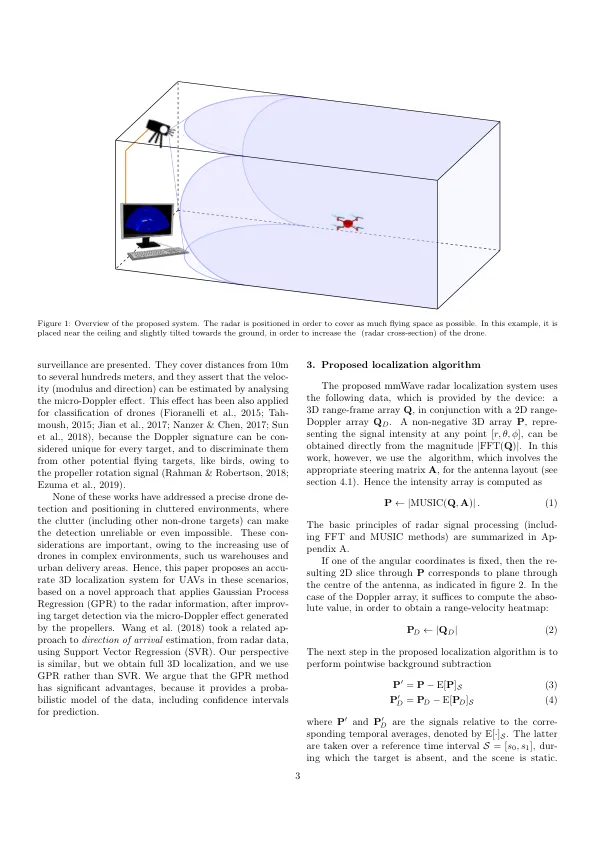
近年来,无人驾驶汽车的检测和定位对于自动化和监视任务至关重要。精确的无人机定位系统的设计具有挑战性,尤其是在杂乱的环境中,目标可能部分甚至完全遮盖了目标。本文通过毫米波雷达提出了针对无人机的精确检测和3D定位系统。无人机位置是根据接收到的雷达信号的空间热图估算的,这些雷达信号是通过应用超分辨率音乐算法获得的。通过分析由旋转螺旋桨产生的微多普勒效应的分析来改善这些估计,从而有助于可见性条件下的检测。开发了一种新型的高斯过程回归模型,以补偿雷达数据中的系统偏见。完整的系统可产生目标范围和方向的准确估计,并显示出优于直接光谱分析方法。
使用毫米波雷达
主要关键词




相关文件推荐