机构名称:
¥ 1.0
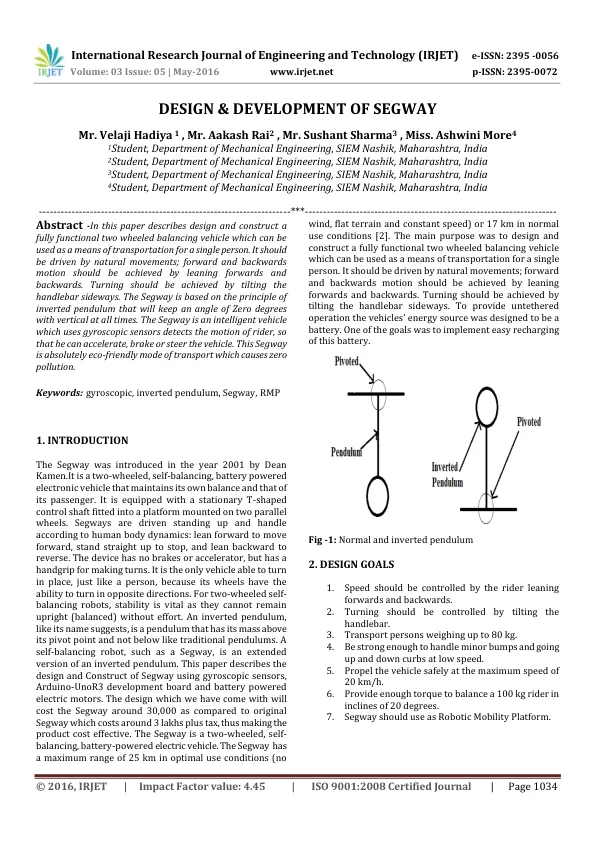
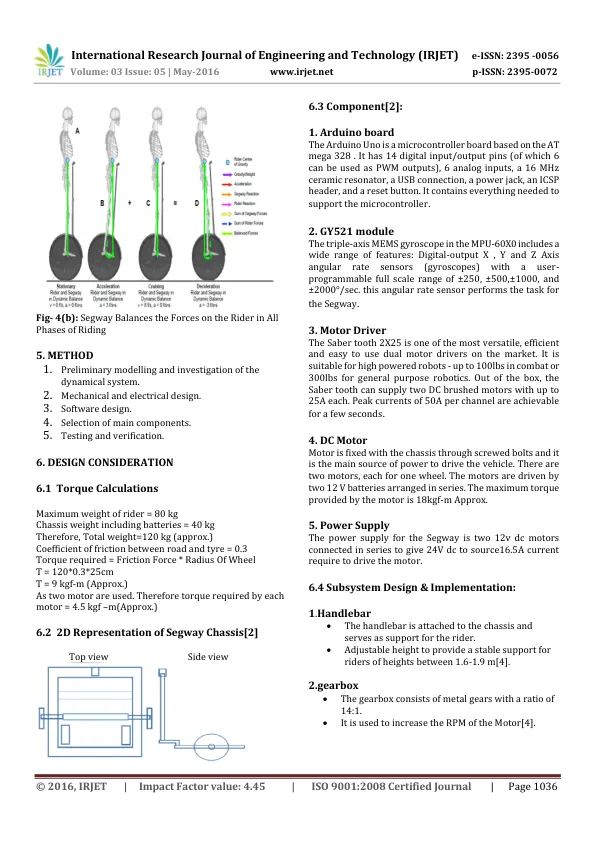
Segway是由Dean Kamen于2001年推出的,它是一款两轮,自动平衡,电池供电的电子车辆,可保持其自身的平衡和乘客的平衡。它配备了一个固定的T形控制轴,该控制轴安装在安装在两个平行轮上的平台中。segways被驱动地站起来,根据人体动态:向前倾斜,向前移动,直立站着停下来,向后倾斜以倒退。该设备没有制动器或加速器,但有一个用于转弯的手夹。它是唯一能够像人一样到位的车辆,因为其车轮具有朝相反方向转向的能力。对于两轮自动平衡机器人,稳定性至关重要,因为它们不能在不努力的情况下保持直立(平衡)。正如其名称所表明的那样,倒置的摆板是一个摆在枢轴上方的摆,不像传统的摆板那样低于传统的摆。一个自平衡的机器人,例如Segway,是倒置的扩展版本。本文使用陀螺仪传感器,Arduino-Unor3开发板和电池供电的电动机描述了Segway的设计和构造。与原始的Segway相比,我们所提供的设计将使Segway花费约30,000,而Segway的费用约为30万,加上税收,从而使产品成本有效。Segway是两轮,自动平衡,电池供电的电动汽车。Segway在最佳使用条件下的最大范围为25 km(否
Segway的设计与开发
主要关键词



相关文件推荐