机构名称:
¥ 1.0
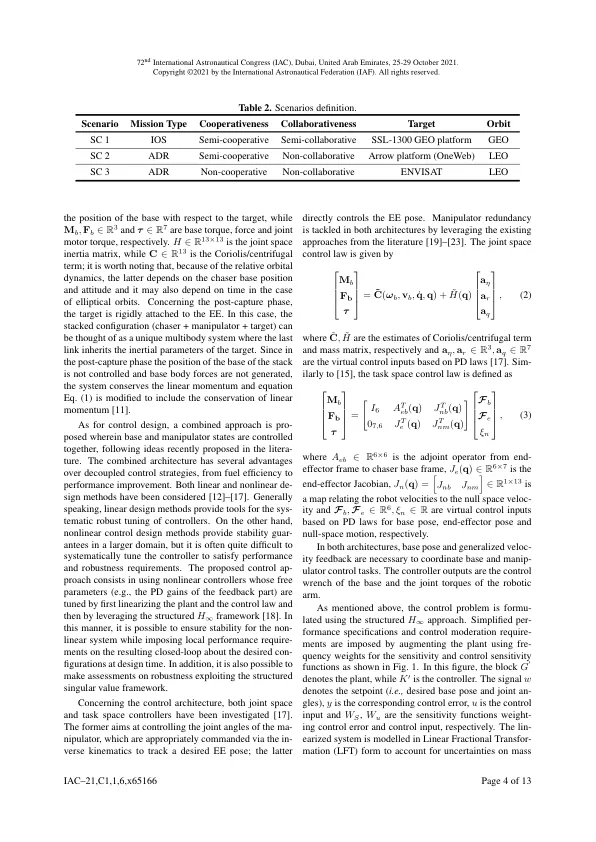
在轨服务(IOS)可以延长卫星的使用寿命,而实施主动碎片清除(ADR)以有效解决空间碎片问题的必要性已在航天界广为人知。在新一代传感器和控制系统的发展的推动下,实现此类任务的技术解决方案研究正在蓬勃发展。除了私营公司、航天机构和大学之外,欧洲航天局(ESA)几十年来一直在开发该领域的技术。多年来,人们提出了多种安全捕获轨道物体的解决方案,其中大多数依赖于机器人系统。一个有前途的选择是使用配备高度灵巧的机械臂的自主航天器(追逐者),该机械臂能够与驻留的空间物体对接。这一操作在接近阶段和接触后都带来了复杂的技术挑战。在这方面,设计一个有效、可靠、稳健的制导、导航和控制 (GNC) 系统对于确保安全执行任务起着关键作用,该系统可以实现多种算法架构和硬件配置。这项工作展示了由与 ESA 签订合同的大学联盟开展的研究活动的成果,该研究旨在开发 GNC 系统的导航和控制子系统,用于控制配备冗余机械手的追赶者。研究中考虑了捕获前的最终接近阶段和捕获后的目标稳定阶段。提出的解决方案旨在实施联合控制策略。采用稳健控制方法来设计控制律,以应对追赶者的不确定、非线性动力学以及捕获后完整的追赶者-目标堆栈。选择基于视觉的解决方案,即依靠主动/被动光电传感器,进行相对导航。用于相对和绝对导航的完整传感器套件是 GNC 系统的一部分,包括用于机器人关节测量的传感器。为了正确验证提出的解决方案,已经开发了一个完整的数值模拟器。该软件工具可以全面评估系统性能,考虑所有相关的外部干扰和误差源。真实的合成图像生成器也用于相对导航性能评估。本文介绍了设计解决方案和初步数值测试的结果,考虑了三种任务场景,以证明该解决方案的灵活性及其对各种操作情况的适用性。
机器人捕获航天器的联合控制和导航方法
主要关键词



相关文件推荐